
Project Details
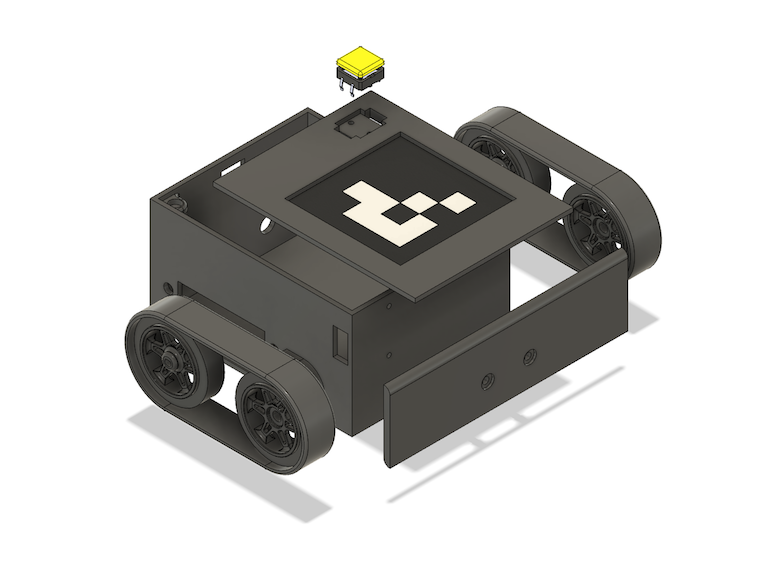


Workspace Wizard
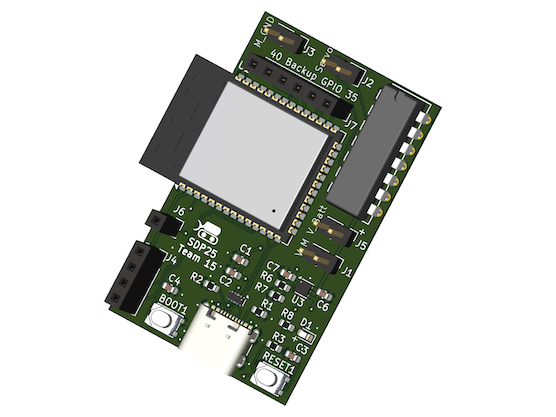
As the Mechatronics and Logistics Lead for the Workspace Wizard project, I am responsible for overseeing the integration of various hardware components and ensuring the effective communication between the robot, overhead camera, and charging station. My role involves coordinating logistics to optimize the placement and accessibility of components, which is crucial for the project's overall efficiency. I am currently developing a robust PCB prototype that facilitates reliable Bluetooth communication and precise motor control, enabling the robot to autonomously organize the workspace. Through careful planning and implementation, I am driving the progress of our autonomous desk organization system, ensuring it meets functional specifications while adhering to project timelines.
Project information
- Category: Senior Design Project
- Technologies Used: KiCad, Fusion 360, Servo Motor Control, OpenCV, Bluetooth Low Energy (BLE), Git Version Control
- Project Links:
- Documentation
- Video